































Чудо-присоски: робот-осьминог ощущает окружающую среду и приспосабливается к ней
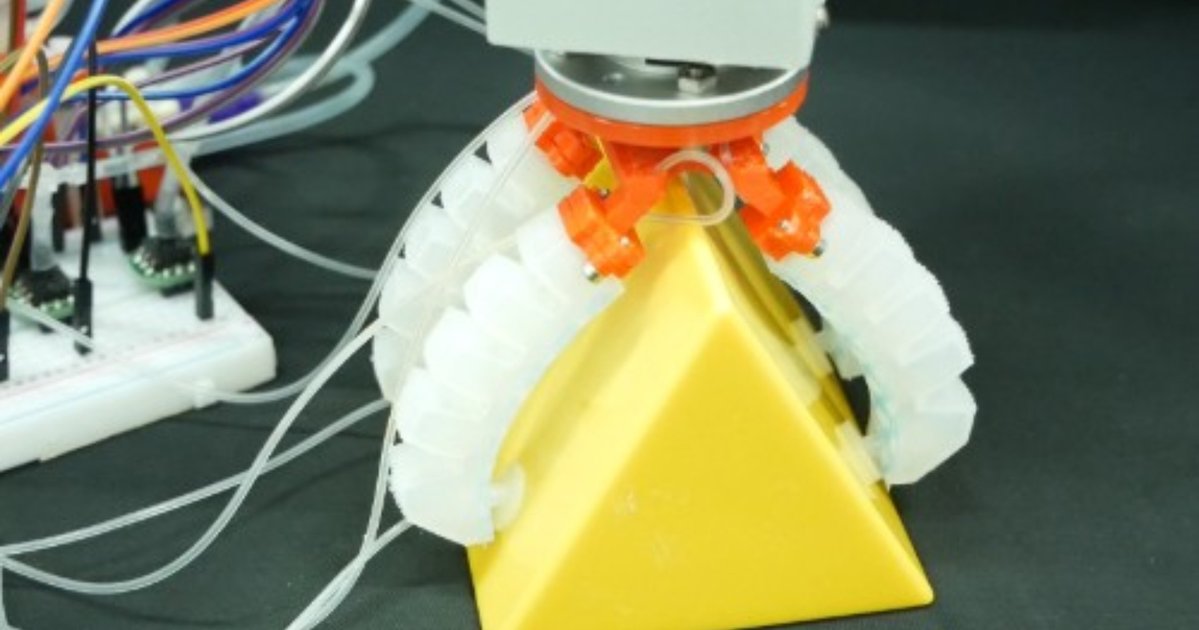
Ученые из Университета Бристоля вдохновились нервной системой осьминога и разработали совершенно необычного робота, который может сам принимать решения о движении и захвате объектов, ориентируясь только на сигналы из окружающей среды. В природе осьминог управляет своими многочисленными щупальцами и сотнями присосок за счет распределенной особым образом нервной системы. Именно этот принцип лег в основу конструкции робота, который использует потоки жидкости внутри своей структуры, чтобы координировать свои движения и сцепление с поверхностями. В результате одна и та же присоска может одновременно удерживать объект, определять, с какой поверхностью она соприкасается — водой, воздухом или шероховатым материалом — и даже предсказывать, какое усилие к ней приложено. По словам автора исследования Тяньци Юэ, новая разработка стала развитием более ранней технологии, в которой искусственная присоска воспроизводила механизм прилипания осьминога к камням. Теперь же речь идет буквально о механическом воплощении «интеллекта осьминога» — системы, которая имитирует не только функцию прилипания, но и элементы нейромышечной координации. Благодаря этому робот может выполнять достаточно тонкие и адаптивные действия: мягко захватывать хрупкие объекты, обвивать собой предметы сложной формы, распознавать текстуру поверхности и адаптироваться к различным условиям.
Ученые из Университета Бристоля вдохновились нервной системой осьминога и разработали совершенно необычного робота, который может сам принимать решения о движении и захвате объектов, ориентируясь только на сигналы из окружающей среды.
В природе осьминог управляет своими многочисленными щупальцами и сотнями присосок за счет распределенной особым образом нервной системы. Именно этот принцип лег в основу конструкции робота, который использует потоки жидкости внутри своей структуры, чтобы координировать свои движения и сцепление с поверхностями. В результате одна и та же присоска может одновременно удерживать объект, определять, с какой поверхностью она соприкасается — водой, воздухом или шероховатым материалом — и даже предсказывать, какое усилие к ней приложено.
По словам автора исследования Тяньци Юэ, новая разработка стала развитием более ранней технологии, в которой искусственная присоска воспроизводила механизм прилипания осьминога к камням. Теперь же речь идет буквально о механическом воплощении «интеллекта осьминога» — системы, которая имитирует не только функцию прилипания, но и элементы нейромышечной координации. Благодаря этому робот может выполнять достаточно тонкие и адаптивные действия: мягко захватывать хрупкие объекты, обвивать собой предметы сложной формы, распознавать текстуру поверхности и адаптироваться к различным условиям.