














.jpg?width=1920&height=1920&fit=bounds&quality=80&format=jpg&auto=webp#)















































Sols 4484-4485: Remote Sensing on a Monday
Written by Conor Hayes, Graduate Student at York University Earth planning date: Monday, March 17, 2025 Last week I was in Houston, Texas, at the Lunar and Planetary Science Conference. The mid-March weather in Houston is often more like mid-summer weather here in Toronto, so it has been a bit of a shock coming home […]

4 min read
Sols 4484-4485: Remote Sensing on a Monday

Written by Conor Hayes, Graduate Student at York University
Earth planning date: Monday, March 17, 2025
Last week I was in Houston, Texas, at the Lunar and Planetary Science Conference. The mid-March weather in Houston is often more like mid-summer weather here in Toronto, so it has been a bit of a shock coming home to temperatures that are hovering around freezing rather than being in the upper 20s (degrees Celsius, or the low to mid 80s for those of you still using Fahrenheit). Still, Toronto is positively balmy compared to Gale Crater, where temperatures usually range between minus 80°C and minus 20°C (or minus 110°F to minus 5°F) during this part of the year. These cold temperatures and their associated higher demands on the rover’s available power for heating are continuing to motivate many of the decisions that we make during planning.
We received the double good news this morning that the weekend’s drive completed successfully, including the mid-drive imaging of the other side of “Humber Park” that Michelle mentioned in Friday’s blog, and that our estimates of the weekend plan’s power consumption ended up being a little conservative. So we started planning exactly where we wanted to be, and with more power to play around with than we had expected. Yay!
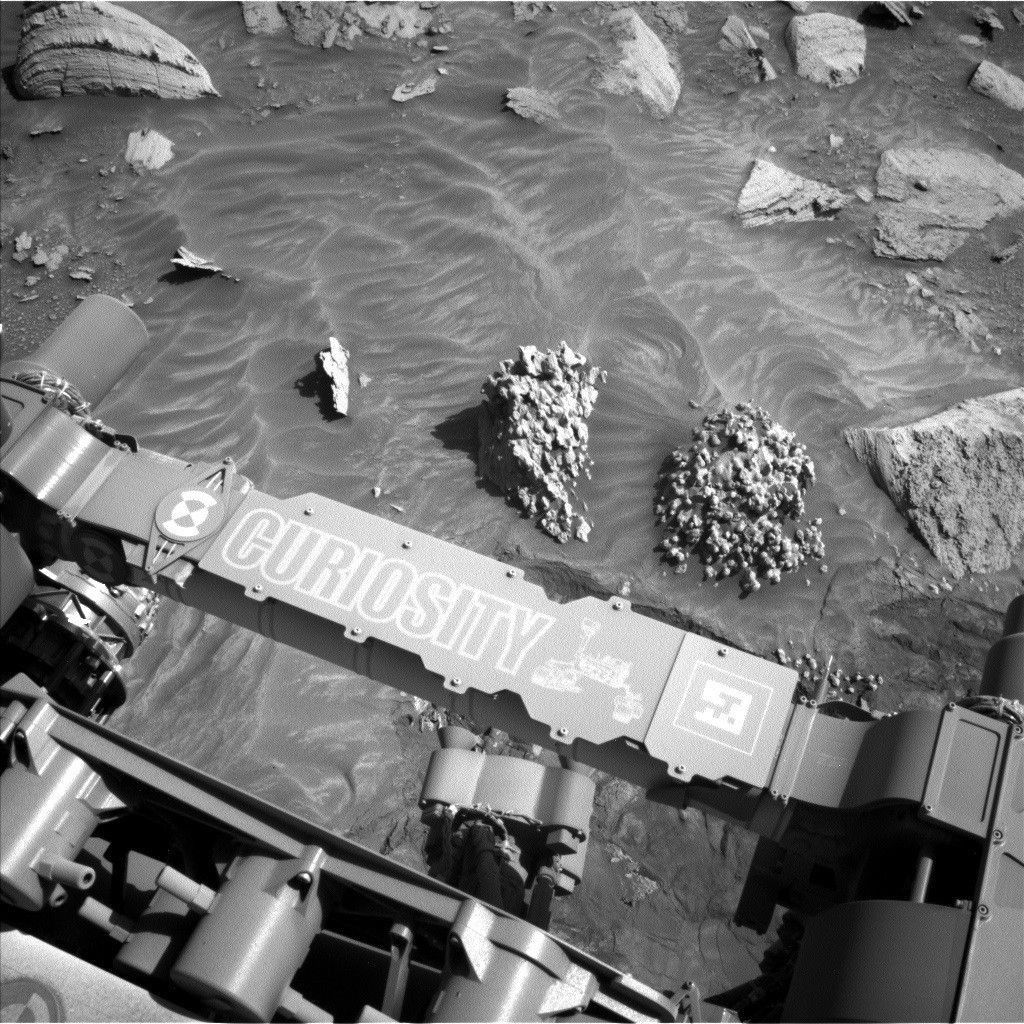
The weekend’s drive left us parked in front of some rocks with excellent layering and interesting ripples that we really wanted to get a closer look at with MAHLI. (See the cover image for a look at these rocks as seen by Navcam.) Sadly, we also ended up parked in such a way that presented a slip hazard if the arm was unstowed. As much as we would have loved to get close-up images of these rocks, we love keeping Curiosity’s arm safe even more, so we had to settle for a remote sensing-only plan instead.
Both the geology and mineralogy (GEO) and the environmental science (ENV) teams took full advantage of the extra power gifted to us today to create a plan packed full of remote sensing observations. Because we’re driving on the first sol of this two-sol plan, any “targeted” observations, i.e. those where we know exactly where we want to point the rover’s cameras, must take place before the drive. The first sol is thus packed full of Mastcam and ChemCam observations, starting with a 14×3 Mastcam mosaic of the area in front of us that’s outside of today’s workspace. Individual targets then get some Mastcam love with mosaics of various ripple and layering features at “Verdugo Peak,” “Silver Moccasin Trail,” and “Jones Peak.” Mastcam and ChemCam also team up on a LIBS target, “Trancas Canyon,” and some more long-distance mosaics of Gould Mesa, a feature about 100 meters away from us (about 328 feet) that we’ll be driving to the south of as we continue to head toward the “boxwork” structures.
After a drive, there often aren’t many activities scheduled other than the imaging of our new location that we’ll need for the next planning day. However, in this plan ENV decided to take advantage of the fact that Navcam observations can take place at the same time that the rover is talking to one of the spacecraft that orbit Mars. This is a useful trick when power is tight as it allows us to do more science without adding additional awake time (since the rover needs to be awake anyway to communicate with the orbiters). Today, it’s being used to get some extra cloud observations right before sunset, a time that we don’t often get to observe. These observations include a zenith movie that looks straight up over the rover and a “phase function sky survey,” which takes a series of nine movies that form a dome around the rover to examine the properties of the clouds’ ice crystals.
The second sol of this plan is much more relaxed, as post-drive sols often are because we don’t know exactly where we’ll be after a drive. Today, we’ve just got our usual ChemCam AEGIS activity, followed by a pair of Navcam cloud and cloud shadow movies to measure the altitude of clouds over Gale. As always, we’ve also got our usual set of REMS, RAD, and DAN activities throughout this plan.