











































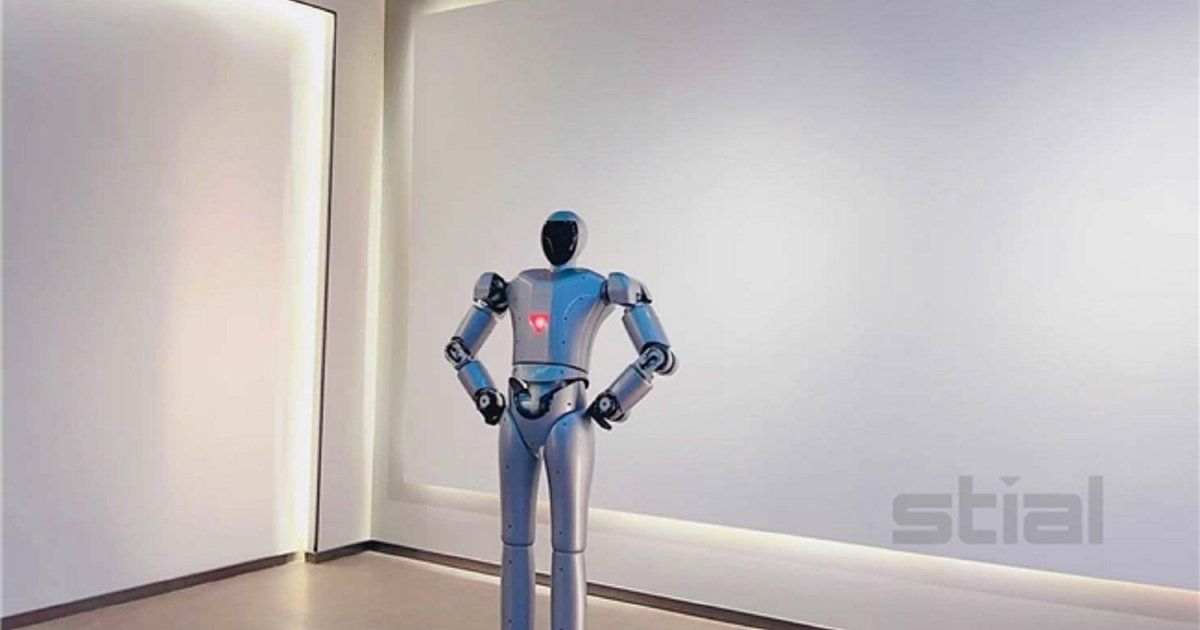
Создан первый в мире робот-полировщик
Гуманоид может динамически изменять силу, углы и траектории в режиме реального времени благодаря собственной базе данных процессов и сложным 6D-датчикам силы. Китайская компания Stial Technologies представила первого в мире гуманоидного робота, созданного для выполнения сложных задач по полировке. В отличие от обычных роборук, гуманоид Stial Steven имитирует движения человека для повышения гибкости и адаптивности. Его конструкция отлично подходит для обработки сложных деталей, тонкой полировки, точной работы в ограниченном пространстве и чувствительной отделки поверхности в различных секторах. Гуманоид может динамически изменять силу, углы и траектории в режиме реального времени благодаря собственной базе данных процессов, сложным 6D-датчикам силы и мультимодальной модели ИИ, которая объединяет зрение, тактильные ощущения и слуховое восприятие. Робот отлично справляется с работой на сложных криволинейных поверхностях и при полировке мелких деталей, помогая производству достигать большей точности обработки с меньшими трудозатратами и большей согласованностью. Высокоточные датчики 6D отслеживают контактные силы в реальном времени между роботом и заготовкой, передавая данные ИИ-системе NextBrain. Это позволяет динамически корректировать давление, направление и угол полировки, обеспечивая оптимальную гибкость и контроль. Датчики силы 6D значительно повышают общую производительность устройства, а в сочетании с его адаптивными алгоритмами управления увеличивают возможности полировки с контролируемым усилием.
Гуманоид может динамически изменять силу, углы и траектории в режиме реального времени благодаря собственной базе данных процессов и сложным 6D-датчикам силы.
Китайская компания Stial Technologies представила первого в мире гуманоидного робота, созданного для выполнения сложных задач по полировке. В отличие от обычных роборук, гуманоид Stial Steven имитирует движения человека для повышения гибкости и адаптивности.
Его конструкция отлично подходит для обработки сложных деталей, тонкой полировки, точной работы в ограниченном пространстве и чувствительной отделки поверхности в различных секторах.
Гуманоид может динамически изменять силу, углы и траектории в режиме реального времени благодаря собственной базе данных процессов, сложным 6D-датчикам силы и мультимодальной модели ИИ, которая объединяет зрение, тактильные ощущения и слуховое восприятие.
Робот отлично справляется с работой на сложных криволинейных поверхностях и при полировке мелких деталей, помогая производству достигать большей точности обработки с меньшими трудозатратами и большей согласованностью.
Высокоточные датчики 6D отслеживают контактные силы в реальном времени между роботом и заготовкой, передавая данные ИИ-системе NextBrain. Это позволяет динамически корректировать давление, направление и угол полировки, обеспечивая оптимальную гибкость и контроль. Датчики силы 6D значительно повышают общую производительность устройства, а в сочетании с его адаптивными алгоритмами управления увеличивают возможности полировки с контролируемым усилием.



