





























































Grasp As You Say: Robot Hand Learns Dexterous Grasping from Language. 87% Success!
This is a Plain English Papers summary of a research paper called Grasp As You Say: Robot Hand Learns Dexterous Grasping from Language. 87% Success!. If you like these kinds of analysis, you should join AImodels.fyi or follow us on Twitter. Overview DexTOG is a framework for generating task-oriented dexterous grasps based on natural language instructions Uses a dual-branch architecture with language embeddings from CLIP and object point clouds Achieves 87.4% success rate on the ContactDB dataset Generalizes to unseen objects with 74.4% success rate Incorporates tactile feedback to improve grasping strategy Plain English Explanation DexTOG solves a common problem in robotics: teaching robots to grab objects in ways that make sense for specific tasks. Think about how differently you'd hold a cup if you were going to drink from it versus if you were going to pack it in a box. Humans do this naturally, but ro... Click here to read the full summary of this paper
This is a Plain English Papers summary of a research paper called Grasp As You Say: Robot Hand Learns Dexterous Grasping from Language. 87% Success!. If you like these kinds of analysis, you should join AImodels.fyi or follow us on Twitter.
Overview
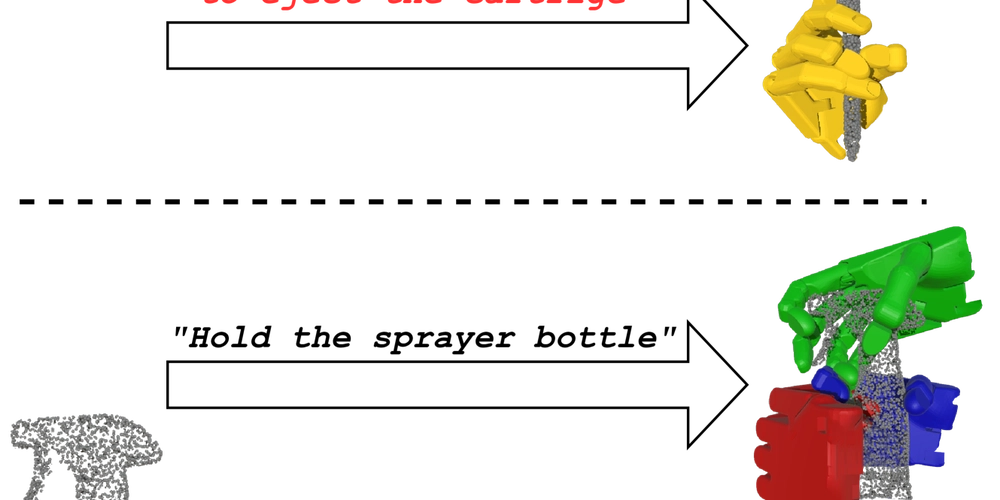
- DexTOG is a framework for generating task-oriented dexterous grasps based on natural language instructions
- Uses a dual-branch architecture with language embeddings from CLIP and object point clouds
- Achieves 87.4% success rate on the ContactDB dataset
- Generalizes to unseen objects with 74.4% success rate
- Incorporates tactile feedback to improve grasping strategy
Plain English Explanation
DexTOG solves a common problem in robotics: teaching robots to grab objects in ways that make sense for specific tasks. Think about how differently you'd hold a cup if you were going to drink from it versus if you were going to pack it in a box. Humans do this naturally, but ro...